
Isuru Munasinghe

About Me
Isuru Munasinghe is an accomplished engineer with a Bachelor of Science in Electronic and Telecommunication Engineering from the University of Moratuwa, Sri Lanka, graduating with first-class honors and a cumulative GPA of 3.94. He has a strong academic background in fields such as robotics, autonomous systems, and AI. He is an Associate Member of the Institution of Engineers, Sri Lanka (IESL), reflecting his dedication to professional growth and engineering excellence.
His research interests encompass robotics, mechatronics, autonomous systems, human-robot interaction, UAV-UGV collaboration, and artificial intelligence. He has presented and published his research at international conferences and actively participated in several international and all-island competitions, securing top positions based on his innovative contributions. These achievements highlight his commitment to advancing technology and pushing the boundaries of engineering.
Work Experience
Software Engineer
IoT and Middleware Practice,
Axiata Digital Labs, Sri Lanka.
IoT and Middleware Practice at Axiata Digital Labs, Sri Lanka, specializes in developing IoT solutions integrated with middleware technologies and providing advanced telco software solutions, enhancing connectivity, data management, and digital transformation across various industries.
Visiting Instructor
Department of Electronic and Telecommunication Engineering
University of Moratuwa, Sri Lanka.
Module No: EN2091 – Laboratory Practices and Projects, focusing on laboratory experiments in Analog and Digital Electronics, and Fundamentals of Computer Organization and Design.
Trainee Electronic Engineer
Vega Innovations, Sri Lanka.
Vega Innovations is a Sri Lankan electric vehicle and technology company known for developing South Asia’s first all-electric supercar, the Vega EVX. The company focuses on sustainable transportation solutions, advanced engineering, and cutting-edge research in electric vehicle technology and innovation.
Publications
Conference Papers
- Isuru Munasinghe, Vishva Vijenayake, Sahan Viduranga, Yomali Lokugama, and Peshala Jayasekara, Design and Implementation of a Semi-Autonomous Robotic System for Systematic Solar Panel Cleaning, in 9th International Conference on Control and Robotics Engineering (ICCRE), Osaka, Japan. 2024, pp. 61-67
Link : https://ieeexplore.ieee.org/document/10589856 - Isuru Munasinghe, Vishva Vijenayake, and Peshala Jayasekara, Improving Navigation of a Semi-Autonomous Solar Panel Cleaning Robot through Advanced Localization and Edge Detection, in 2nd International Conference on Advances in Science, Engineering and Technology (ICASET), Hanoi, Vietnam. 2024. (Accepted and presented, not yet available in the archive)
Journal Papers
- Isuru Munasinghe, Asanka Perera, and Ravinesh C. Deo, A Comprehensive Review of UAV-UGV Collaboration: Advancements and Challenges, in Journal of Sensor and Actuator Networks (JSAN), 2024. (Submitted and Under Review – Q1 Journal)
Link : http://dx.doi.org/10.13140/RG.2.2.22267.73764
Honors & Awards
- Member of Judge Panel, Sri Lankan Robotics Challenge – 2024
Organized by the Sri Lankan Robotics Challenge Committee, Sri Lanka - Dean’s List – Faculty of Engineering 2019 – 2023
Awarded by University of Moratuwa, Sri Lanka
Recognized for achieving a GPA above 3.80 in 3, 4, 5, 6, 7 and 8 semesters - 2nd Runners-Up – SPARK Challenge 2021/22
- Top 5 Innovation Ideas – IEEE INNOVMIND International Ideathon IoT Competition – 2021
- Mahapola Higher Education (Super Merit) Scholarship Award – 2018
Awarded by the Government of Sri Lanka
Granted the scholarship scheme for exceptional performance in G.C.E. Advanced Level Examination 2017 by the Ministry of Higher Education - Most Outstanding Sumangalian Award – 2018
Awarded by Sri Sumangala College, Panadura in Sri Lanka
Awarded for being the most outstanding student in Physical stream in the academic year 2017/2018 - Bronze Medalist – Physics Olympiad Competition, Sri Lanka – 2017
- 1st Runners-Up – CHEMSOC QUIZ – All Island Inter-School Chemistry Quiz Competition – 2017
- High Distinction – Australian National Chemistry Quiz – Senior Division 2014 – 2016
- Best Student Award – Sri Sumangala College 2015 – 2014
Awarded by Sri Sumangala College, Panadura in Sri Lanka
Projects
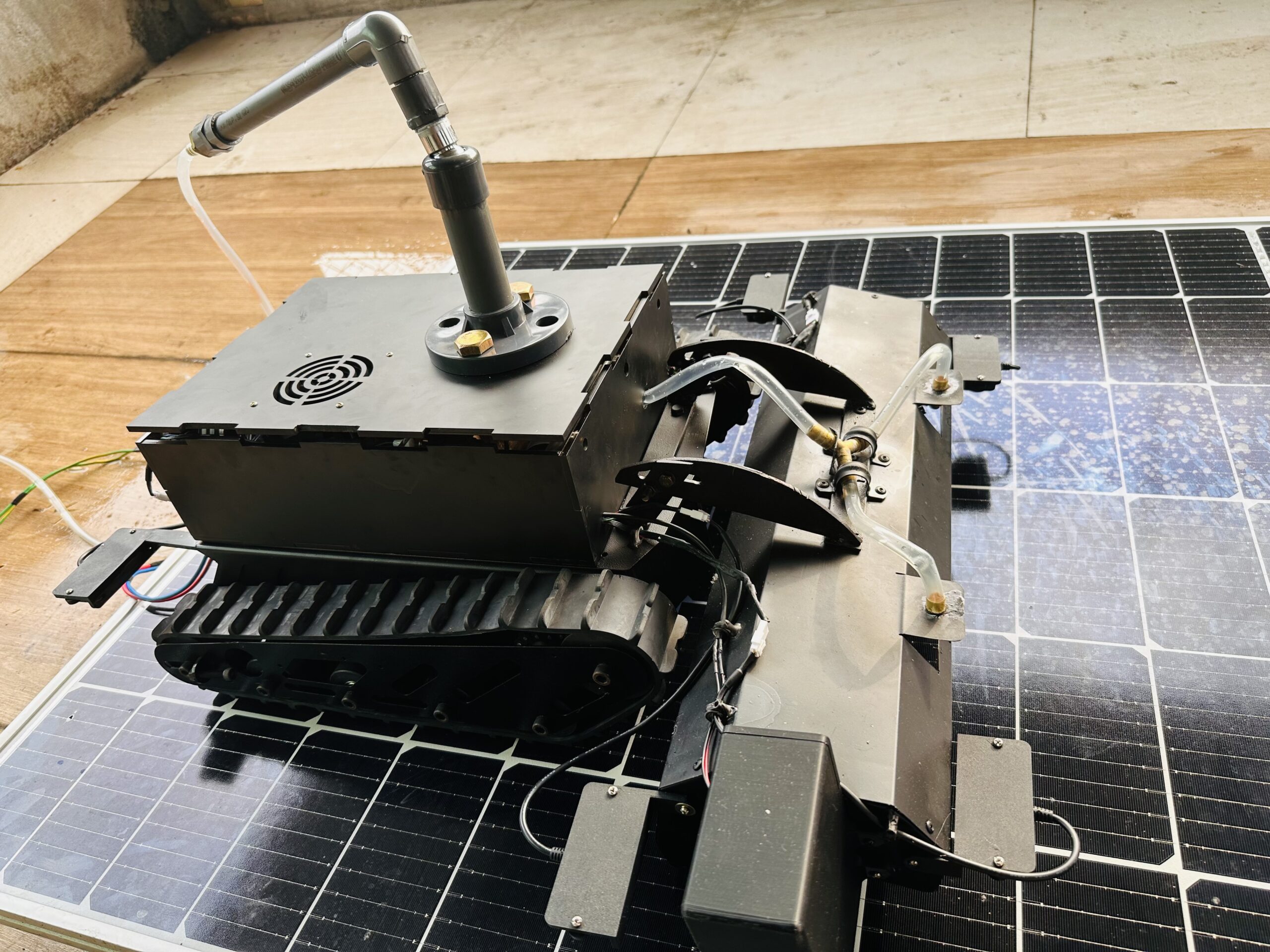
- Semi-Autonomous Solar Panel Cleaning Robot
The semi-autonomous solar panel cleaning robot was designed and implemented to address efficiency challenges in maintaining solar photovoltaic (PV) systems. The system employs advanced edge detection algorithms using ultrasonic sensors and vision-based technologies to navigate solar panel arrays. This robot can autonomously perform dry and wet cleaning, ensuring optimal performance regardless of environmental conditions. It features a robust localization system based on bus-bar detection, allowing precise navigation and ensuring the cleaning process is efficient and damage-free. The use of ultrasonic sensors helps the robot transition smoothly between panels, preventing it from falling off or causing damage during operation.
The design incorporates two Raspberry Pi 3B+ boards: one dedicated to control operations and the other to image processing tasks, ensuring seamless integration of hardware and software components. The robot uses a tracked-wheel mechanism to navigate on solar panels tilted up to 20°, and a mechanical roller brush for cleaning. Enhancing usability, the system is controlled via a mobile app, offering both manual and autonomous operation modes. Additionally, the robot can perform continuous cleaning for 75 minutes on a single charge, efficiently covering a large area of up to 17 square meters in each session.
Key improvements have been made to ensure the accuracy of the robot’s movements, such as the implementation of three parallel Kalman filters to correct gyroscope drift during orientation estimation. Furthermore, a refined water supply mechanism ensures that wet cleaning can be performed without adding excessive weight to the robot. By leveraging advanced localization techniques and integrated mobile control, this robot provides a significant enhancement to solar panel maintenance by reducing the manual effort required and increasing the efficiency of cleaning operations in various environments.
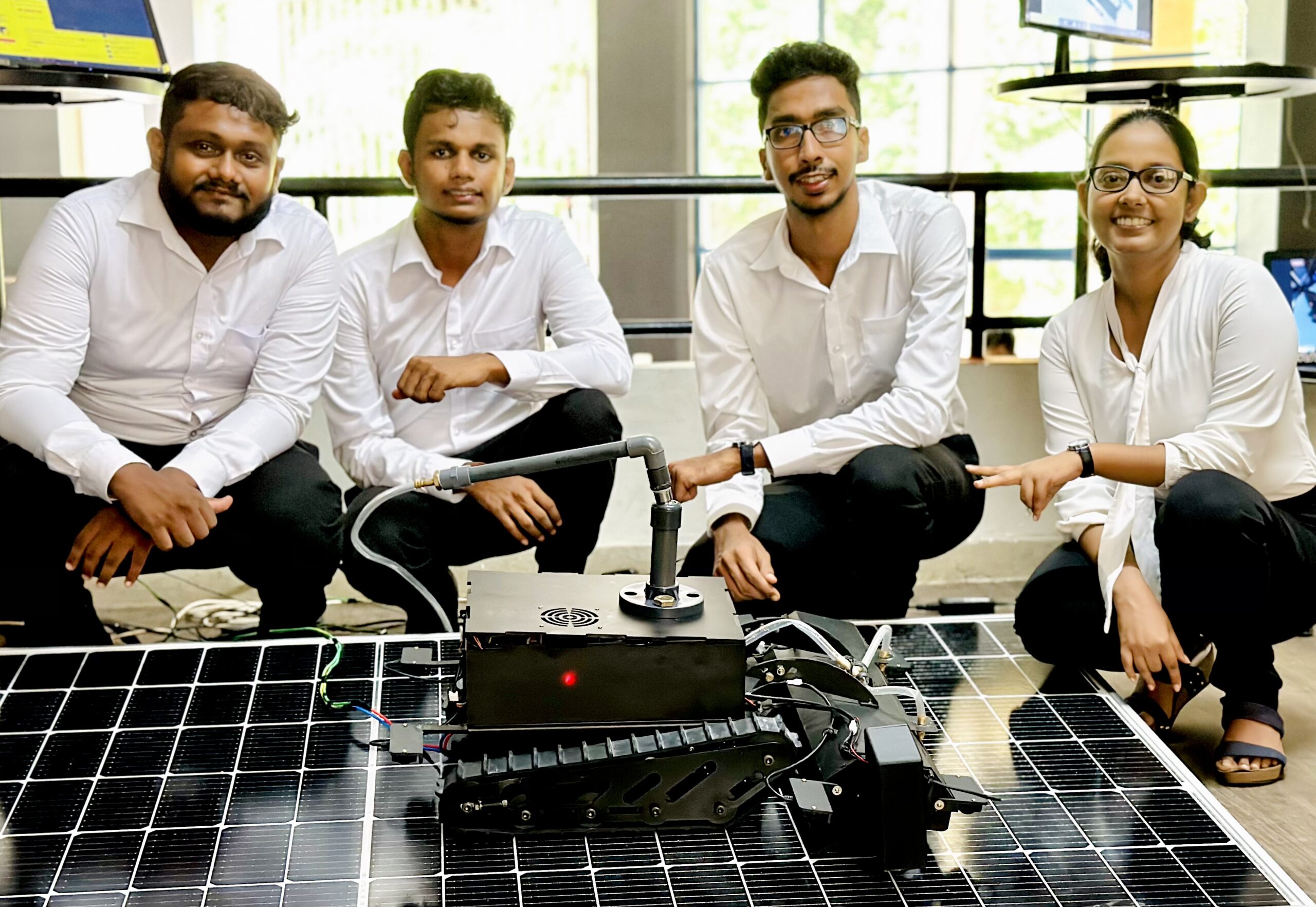
Research Project Group
Implemented Semi-Autonomous Robotic System - System Bus Design
The system bus design involved the creation of a communication framework that connects two masters and three slaves, prioritizing master communication based on urgency. This was achieved through a synchronous arbitration mechanism that ensures only one master controls the bus at any given time, optimizing communication efficiency. The system design includes both internal and external bus architectures, with the internal bus handling communication between masters and slaves and the external bus facilitating data transfer with another FPGA. The bus supports read/write operations and burst transactions, enabling efficient data handling over a 1-bit wide serial communication channel.
An arbiter was designed to grant bus access based on master priority, with a state machine that handles communication requests and grants access accordingly. The entire system was implemented and tested on a Digilent Zybo FPGA development board, validating its functionality through simulation using Verilog test benches - 500W LLC Converter and 5kW Bi-directional Charger
A 500W 72V to 14.5V DC-DC converter was designed and tested for VEGA ETX to enable the charging of a 12V battery from a 72V battery pack. This converter was developed to replace an earlier 250W imported version, which had limitations in power capacity and lacked sufficient protection features. The new converter utilizes LLC topology, selected for its high efficiency, soft switching capabilities, and reduced electromagnetic interference (EMI). Following the design and simulation phase, the converter was implemented and tested, achieving improved performance and efficiency for integration with the VEGA ETX electric three-wheeler.
Additionally, a 5kW 400V to 48V bi-directional charger circuit was developed for a hybrid solar inverter system. This charger enables bi-directional power transfer, allowing a 48V battery to be charged from a 400V source and, conversely, boosting the battery voltage to 400V during discharge. The design involved the implementation of a full-bridge converter topology, incorporating advanced protection mechanisms for overvoltage and current control. The charger was rigorously simulated and tested to ensure its optimal performance within the hybrid inverter system. - Smart Water Condition Monitoring System
The smart water condition monitoring system is a solar-powered solution designed to be installed near water reservoirs. It continuously monitors the concentration of harmful chemicals such as lead, mercury, and ammonia, as well as pH levels. When toxic chemical concentrations deviate from safe thresholds, the system immediately notifies the relevant authorities, along with the exact location, enabling swift action. The system provides real-time monitoring, with users able to access data by entering specific locations, and it offers analytical tools, including graphical representations, to help analyze trends and ensure water safety.
This innovative project earned us the 2nd Runners-Up position in the SPARK Challenge 2021/22, recognizing the system’s potential to significantly enhance environmental monitoring and public health protection.

Receiving certificates and medals by Dr. Ranga Rodrigo, Head of Department of Electronics and Telecommunication Engineering, University of Moratuwa, Sri Lanka

Receiving the award and cash prize for 2nd Runners-Up in the SPARK Challenge 2021/22 alongside team members